Exploring a new space system that combines robot technology and satellite technology
| 2023/10/03 | Members updated |
| 2023/02/17 |
Admission Information of Mechanical Engineering check here If you want to contact with us, send e-mail to info@srobot.mech.e.titech.ac.jp |
| 2022/06/16 | Members updated |
| 2022/03/03 |
Lab information sessions(3/18 13:30~,3/22 16:00~) is now available.
click here
to reserve
|
| 2021/10/05 | Members updated |
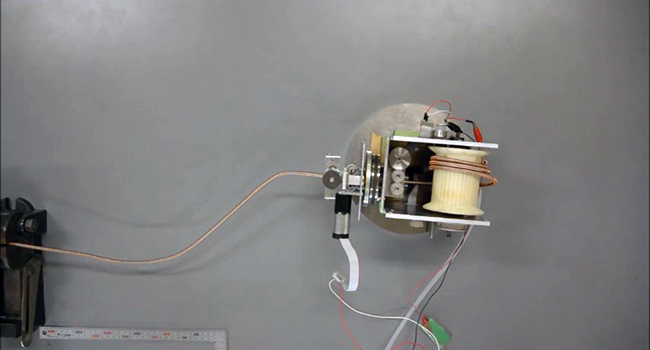
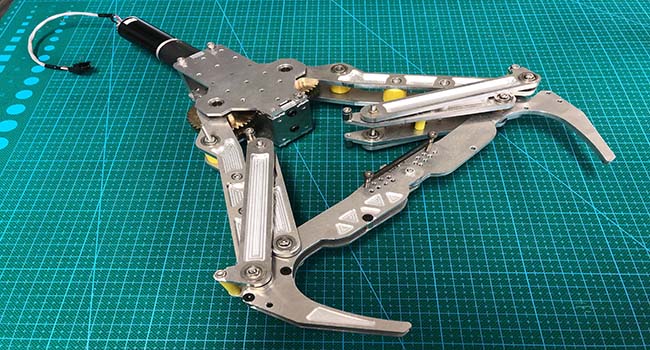
| 2021/07/02 | Low Contact Force Hand was introduced in the Nikkan Kogyo Shimbun |
| 2021/04/07 | Members updated |
| Year | Name | Theme |
|---|---|---|
| 2022 | Misato Ishiwata | Study on a cage-type space debris capture mechanism based on a deployable mast mechanism and a drawstring bag |
| Kenichiro Takahashi | the Study of Modularized Enwrapping Capture Mechanism Based on Vine's Thigmotropism for Capturing Non-Cooperative Targets in Orbit | |
| Yuki Washi | Research on walking legs using a morphable beam in a microgravity environment | |
| 2021 | Kawaguchi Naoki | Study on Design of Truss Structure Grasping End-effector with 6-DOF Relative Position Fixation for On-Orbit Service |
| Hiroyuki Kobayashi | Research of the 3-axis attitude control method of Spacecraft by solar radiation pressure using Reflectivity Control Device | |
| Fumitaka Sagawa | Asteroid Capturing and Fixing Method with Tether | |
| Nobutaka Fukushima | Research of the Redeployable Convex Spring Mechanism for Space Debris Capture | |
| Hashimoto Takuya | Research on Space Debris Capture Mechanism Combined Convex Shaped Spring and Exoskeleton Structure | |
| 2020 | Yuki Nakatsuka | Dynamics of Morfable Beam for Space Robots |
| Teruaki Hayashi | Adaptive Twining Mechanism Based on a Thigmotropism for Capturing Non-Cooperative Space Objects | |
| 2019 | Yutaka Yamazaki | Control Method of Contact Force for a Morphable Beam Robot Based on a Deep Learning |
| Youhei Iwasaki | Control Method for Super Multi-Degree-of-Freedom Extendable Robot Arm with Deployment and Shaping Mechanisms on Both Ends | |
| 2018 | Yuto Masuda | Development and Analysis of Debris Capturing System Using Bi-stable Convex Spring |
| 2017 | Yusuke Ota | Astronaut Support Robot with a Morphable-beam-based Extendable Robot Arm |
| Keisuke Taga | Low Contact Force Gripper for Attaching a Deorbit Device to Space Debris |
| Year | Name | Theme |
|---|---|---|
| 2022 | Ryo Saito | Study on satellite grasping mechanism for on-orbit service using rocket interface for small satellites |
| Tomoharu Tanaka | A Study on Application Method of Low-Contact-Force-Hand for Small Spacecraft Docking System | |
| 2021 | Akihiro Tokuyasu | Study on the Control Method of Weighted Convex Spring for Debris Capture Mechanism |
| Shohgo Nomura | Super Articulated Robot for Space which can be Extended and Shaped by External Force | |
| 2020 | Masahiro Kubota | Estimation of Non-Cooperative Target Motion for Capturing Space Debris |
| Kenichiro Takahashi | Membrane Assembly Type Device for Controlled Deorbit of Space Debris | |
| Yuki Washi | Motion Control Method for Space Debris Capture by Free Flying Robots | |
| 2019 | Naoki Kawaguchi | Dynamics Analysis and Design of Low Contact Force Gripper for Attaching Deorbit Device to Space Debris |
| Hiroyuki Kobayashi | Membrane Assemble Space Robot based on a Fastener Mechanism | |
| 2018 | Yuki Nakatsuka | Spherical Helix Inflatable Mechanism for Space Debris Capture |
| Teruaki Hayashi | Controlled Deorbit Method for Space Debris Using Balloon Device |